Prometheus
Logbook
Total Wakatime Hours so far: 1 (source: wakatime)
Total research Hours so far: 13 (source: logbook)
Total Hours so far: 21
Design Requirements
- Core XY
- High bed size/footprint ratio (>75%)
- Decent print quality - suitable for prototyping but doesn’t have to be perfect
Feb 13
Found the project today. I’ve found a few resources such as instructable’s How to design a 3D printer which I’m going to take a look through for now.
I’ve been looking at designs, and I’m very tempted by a coreXY. Specifically though a really small footprint / volume - something that would fit on a desk
Alrigh time to take some apparently ludicrous notes:
- NEMA23 Stepper Motor
- Run @ 36VDC
- 800RPM @ 0.5Nm Torque
- 20mm pulley
- 100x100xX bed size
- Assume 200g toolhead (likely excessive)
- This gives:
- $125ms^{-2}$ acceleration
- $0.942ms^{-1}$ max speed
- $0.31mm$ precision (should be improved)
9:10pm
Currently taking a look at the Voron0 design in more detail because it looks like the best possible reference for what I want to make
Yeah so they seem to be using NEMA14 / NEMA17 stepper motors for the entire project. They’re pretty precise, but the’yre not the most powerful things I’ve ever seen. I’m somewhat still considering my NEMA23 motors, even though I know that I shouldn’t lmao.
Man some of this stuff is so fascinating lmao - 4.2Nm with 1.8 degrees would be so damn cool
Just added the Datasheets folder with the NEMA23 datasheet. I’m thinking that I’ll have to design the printer around whatever my printer choice is, because that is kinda the entire point of the printer. SPEED
10:39
Adding more references for useful parts
11:08
Looking into DigiKey options for motor options. Also adding design requirements
References
- Voron0.2 specs https://all3dp.com/2/voron-0-2-review-3d-printer-specs/
- Voron0.2 website https://vorondesign.com/voron0.2
- NEMA14 1.8 https://www.omc-stepperonline.com/nema-14-bipolar-1-8deg-40ncm-56-7oz-in-1-5a-4-2v-35x35x52mm-4-wires-14hs20-1504s
- NEMA24 1.8 https://www.omc-stepperonline.com/s-series-nema-24-bipolar-1-8deg-4-2nm-594-77oz-in-4-2a-60x60x100mm-4-wires-24hs40-4204s
- NEMA23 0.9 https://www.omc-stepperonline.com/nema-23-bipolar-0-9deg-1-26nm-178-4oz-in-2-8a-2-5v-57x57x56mm-4-wires-23hm22-2804s
Feb 14
Woke up this morning to advice from Adam where he told me to design my toolhead first
Change of plans. Forget going for high speed and quality, I’ve been talking to one of my TDU mentors who suggested going for a more specialty build, especially if this is going to RMRRF. As a result, I’m going to try going for a really really high bed-to-footprint ratio, essentially something where the entire footprint is able to be printed on.
Feb 15
More updates from today. Was out for a fair, bit, but ended up sketching a bit and talking to a guy who knows a fair bit. I think that I’ve settled on the idea of essentially going for a really high bed-to-footprint ratio and then makiong a reasonable desktop printer from that.
Sketch idea:
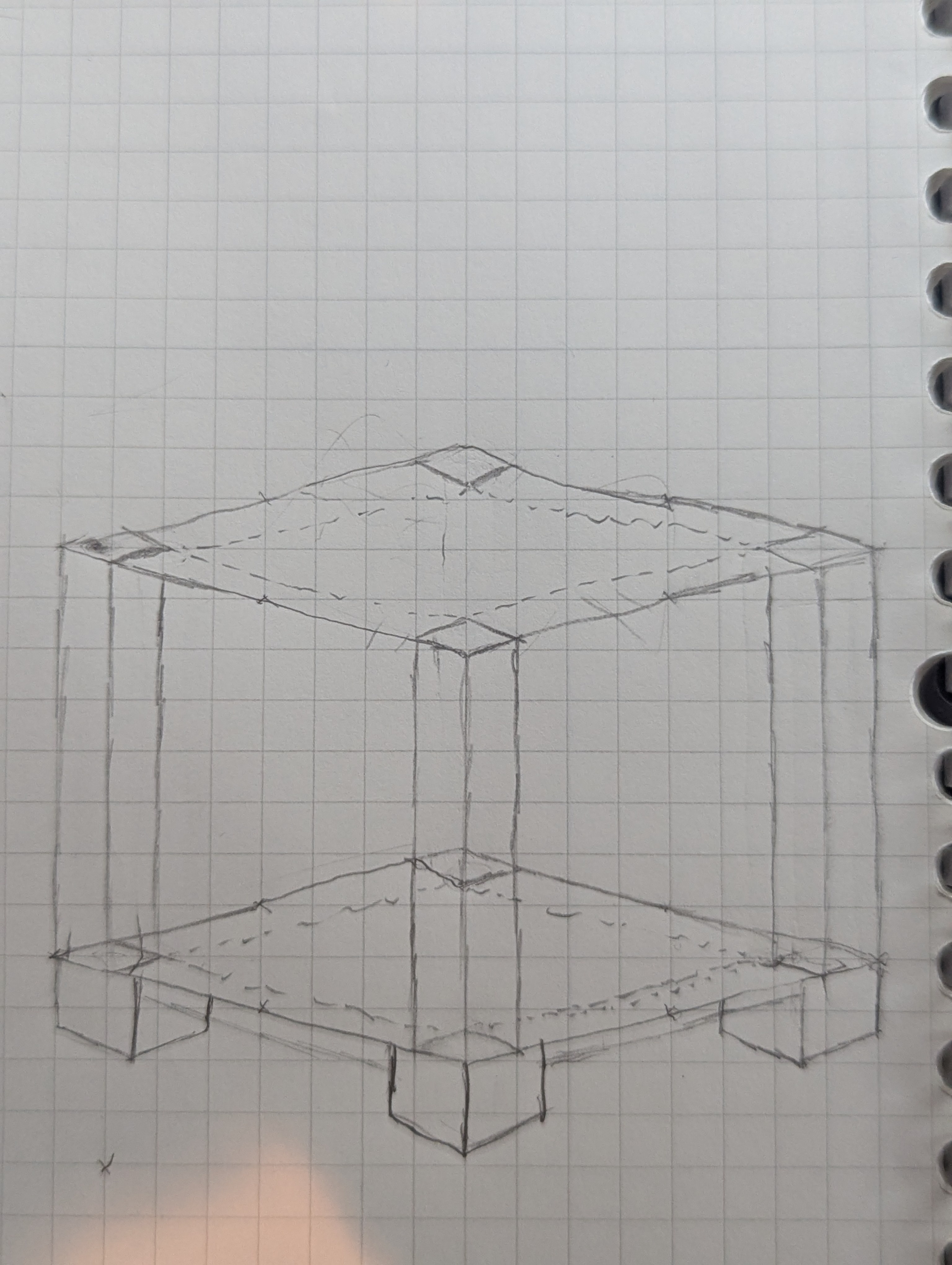
Essentially:
- Fairly thin corner supports probably made from lead screws
- Gantry / head is connected to lead screws in a frame (gantry not drawn in) which will not extend outside of the footprint
- Lead screws are z-axis for either entire printer head or bed (probably bed because weight)
- Feet for all lead screws probably with individual motors for ease of assembly
More design ideas:
- Bowden extruder for ease of design?
- Might look into making the head completely removable
- In general I’m going to take inspiration from the Ender 3 for the toolhead / extruder design
Taking a look at this document for toolhead / extrusion system designs: https://www.bcn3d.com/documents/The_anatomy_of_an_Extrusion_System_BCN3D_Technologies.pdf
Also watching a few videos like this one from 3DJake for more in-depth content on actually designing things
Hours spent today: 3
Feb 16
Considering the EVA if only because it looks interesting: https://main.eva-3d.page/
Actually looking more at the Voron Stealthburner now because apparently it’s a lot more vertical than horizontal.
7:59
Been looking at the way that the toolhead itself is designed for the last hour or two. It’s got quite a few interesting components, and I’ll be making a sketch of my thoughts in a bit. I have decided that I want to go with a custom toolhead though
10:08
Scratch the sketch. Was busy for a bit between then and now and wasn’t really able to do much. Going to go to sleep now.
Total hours researching today: 4
Feb 17
9:16
Scratch everything. I’m going to use a bowden tube for simplicity and because I’ve found a good hotend/coldend assembly to use from E3D: https://e3d-online.com/products/v6-all-metal-hotend?variant=40923457683515
STL: https://www.printables.com/model/77449-e3d-v6-hotend-175mm
Hours today: 1
Feb 19
Was busy cadding some designs for toolhead. Spent about 3 hours.
Feb 20
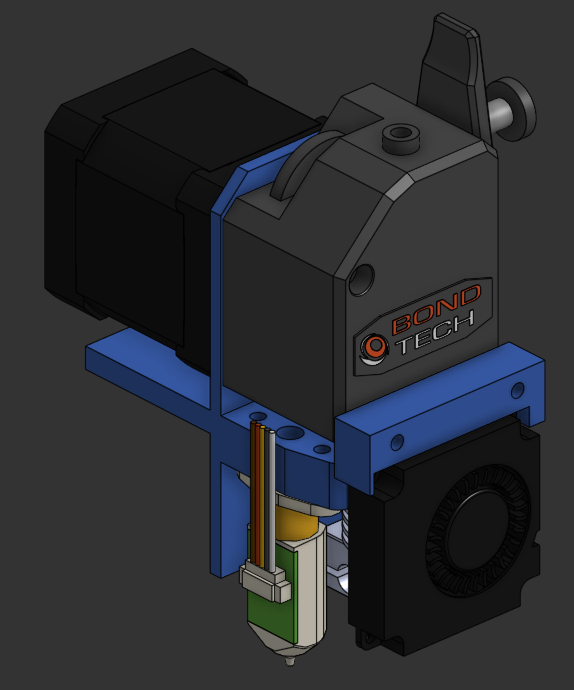
I think that I understand how everything in a toolhead works together, so I’m confident enough to choose a pre-designed one which I can then mount to my printer.
Re-making this model in onshape: https://www.printables.com/model/157268-bondtech-bmg-e3d-v6-extruder-assembly
Man I’m glad that I decided to take a look at this one because I’ve been cadding away at it for a few hours, and I realised fairly early on that I should look at a combo build, because they slot perfectly into one another, which is something that I hadn’t actually realised before lmao. That saves me so much time and effort though.
Hours added today: 2
Feb 22
Was quite busy yesterday so didn’t get any chance to work on the design, but today I’m working on laying out the body of the printer itself.
Oh also found this NEMA17 motor that looks like it’ll be a good idea for my toolhead: https://aus3d.com.au/products/nema-17-34mm-stepper-motor
Update: Progress has been going fairly well. I’m busy researching how things like my lead screws can actually mount to my top part and such. I’m going to have to head out for a while though, although I’ve spent at least like 2 hours on this so far which is good.
Didn’t end up doing much more after, maybe an hour or so of tweaking and a bit of researching on lead screws more.
Hours spent: 3
Feb 24
Thoughts today:
- Firstly, I’ve been working on making my gantry and frame, specifically because I’m trying to figure out how to mount all of my steppers.
- Secondly, my BL-Touch mount can actually be moved to under my extruder, and so I can potentially save an extra 10mm
Hours spent: 4
Feb 25
More gantry design. Not much of an update today though, because really it’s just a bit more research on gantry materials
Hours spent: 1
Feb 26
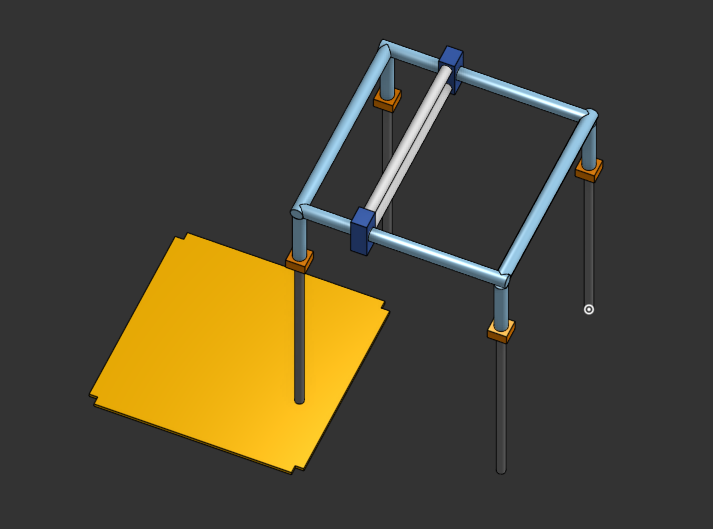
I’ve realised that I think that I can make my gantry from smooth rods and such, and if they’re made from steel then I think that I might be able to make it fairly stable, while maintaining a very slim perimeter
More thoughts on this, but it seems like a fairly promising design idea. I’ll add some photos in a bit
 It’s fairly simple rn, but I’m going to work on it a bit more later. Essentially the entire gantry is made from stell rods
(which are supposed to be fairly stiff) and fairly slim so that there’s as little overlap as possible
It’s fairly simple rn, but I’m going to work on it a bit more later. Essentially the entire gantry is made from stell rods
(which are supposed to be fairly stiff) and fairly slim so that there’s as little overlap as possible
Feb 27
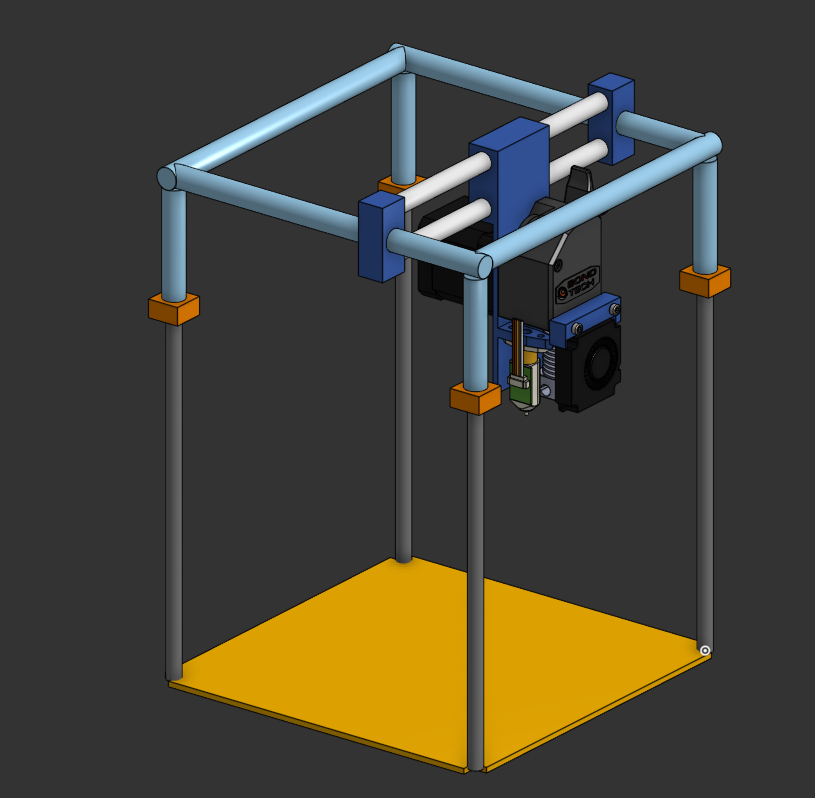
First prototype gantry and toolhead have been designed. (Slack killed the cdn bot so I’m going to use hack.ngo for a bit instead)
Resources
Torque to Force calculator: https://calculator.academy/torque-to-force-calculator/
RPM to linear velocity calculator: https://www.omnicalculator.com/everyday-life/rpm
Degrees to mm converter: https://conversion.website.yandexcloud.net/degrees-to-millimeters.html
Force Calculator: https://www.omnicalculator.com/physics/force
NEMA23 Store Page & Datasheet: https://www.makerstore.com.au/product/elec-nema23-635-ht/
NEMA17 / NEMA23 Torque / Speed curves: https://pages.pbclinear.com/rs/909-BFY-775/images/Data-Sheet-Stepper-Motor-Support.pdf